A collection of animated models in Excel. They were created using cell formulas and VBA. No add-ons or any kind of plugins were used. Read More... "Excel Magic Animation"
Test text.
A collection of animated models in Excel. They were created using cell formulas and VBA. No add-ons or any kind of plugins were used. Read More... "Excel Magic Animation"

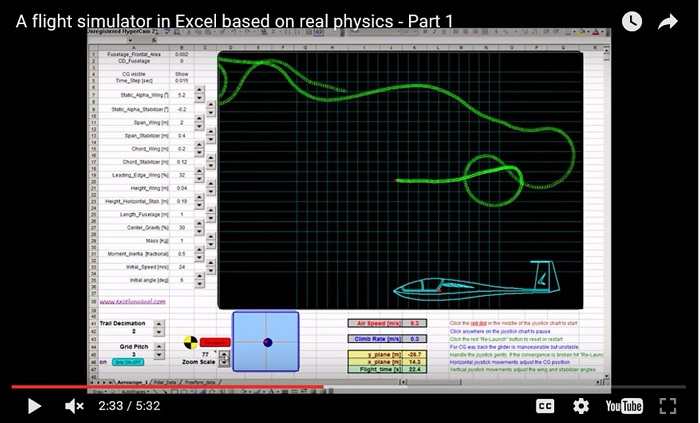
This is a preview to the 3D flight simulator model previously published on this blog. You can download the Excel Model or check out how to build this animation from scratch here: 1, 2, 3, 4, 5, 6, 7. Read More... "A 3D Flight Simulator – video preview"
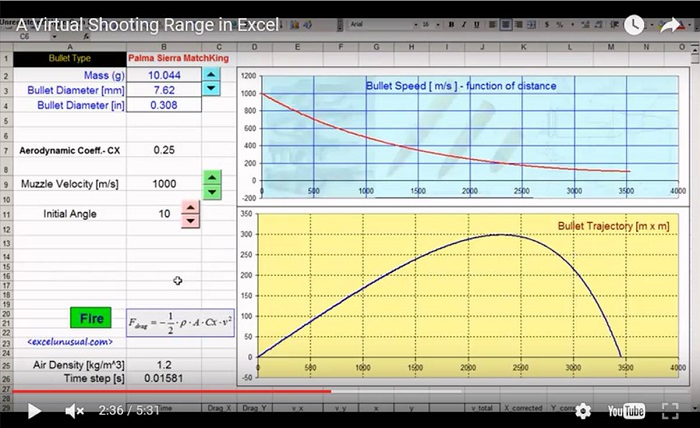
This is a video preview to the shooting range model posted in February 2010. [sociallocker][/sociallocker] Read More... "A Virtual Shooting Range in Excel – video preview"
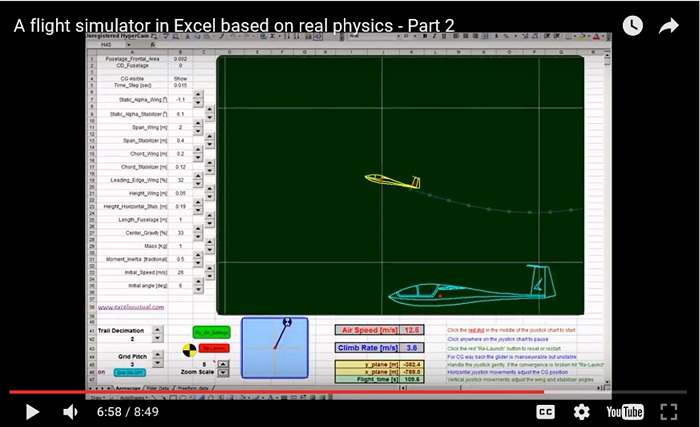
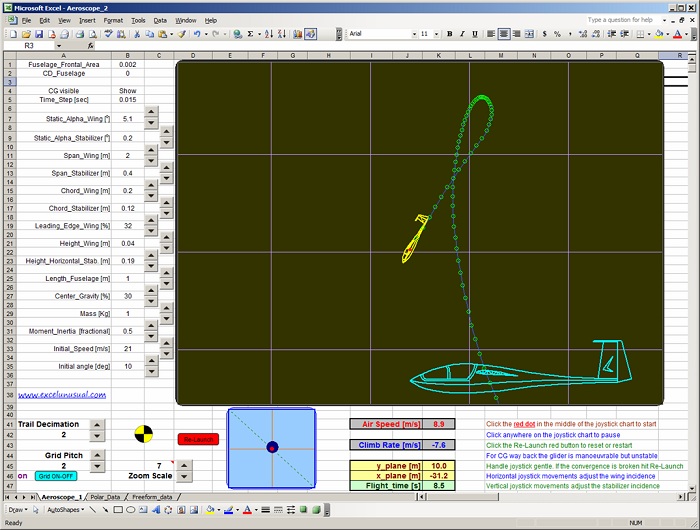
This is an improved version of the Aeroscope – the “Aeroscope_4”. It runs about 50% faster. If you start the model by clicking the green “Fly_by_settings” button you can fly hands-free and adjust parameters during the flight. You can at any time click the red dot in the center of the chart and start the joystick macro, which means that… Read More... "The Aeroscope – video preview #2 and an improved Excel file (#4)"
[sociallocker][/sociallocker] Read More... "The Aeroscope – video preview #1"
In this version, the vertical joystick movement controls the incidence of both the main wing and the horizontal stabilizer (opposite variation) and the horizontal movement of the joystick controls the position of the center of mass. [sociallocker][/sociallocker] Read More... "The Aeroscope – center of mass position control by joystick"
This is an upgraded version of the aeroscope. Besides improving of certain aspects of the old version, this version has both the main wing and the horizontal stabilizer controlled by a virtual joystick (presented on this blog before and used extensively). The horizontal movement of the joystick controls the angle of attack of the main wing and the vertical movement… Read More... "The Aeroscope – an upgraded version controlled by virtual joystick"
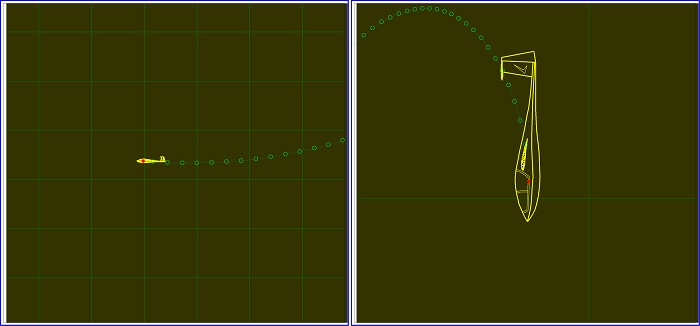
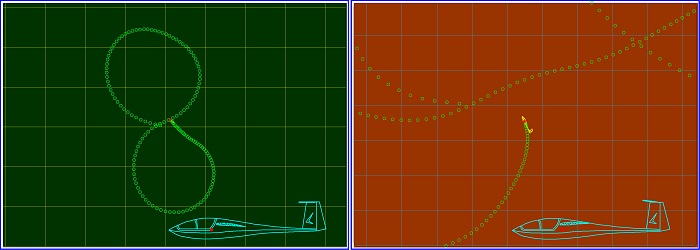
This is the “Aeroscope”, an oscilloscope style 2D dynamic flight simulator. It uses a the glider model designed in the previous tutorial. The glider is fully adjustable so you can change different parameters during the flight. Just hit “Run_pause” and the model will start. Reset it using the red button whenever you wish or whenever it breaks the convergence. For… Read More... "The Aeroscope – a preliminary version of a 2D flight simulator based on real physics"

This section updates an angle formula so that the virtual glider can now perform both backward and forward loops, as well as inverted flight. [sociallocker][/sociallocker] Longitudinal Aircraft Dynamics #11- 360 full coverage – loops by George Lungu – This section fixes an angle issue so that the virtual aircraft will now be able to perform both backward and forward loops. Upgrading… Read More... "Longitudinal Aircraft Dynamics #11 – full 360 degree operation – aerobatics, inverted flight and loops – FINAL"
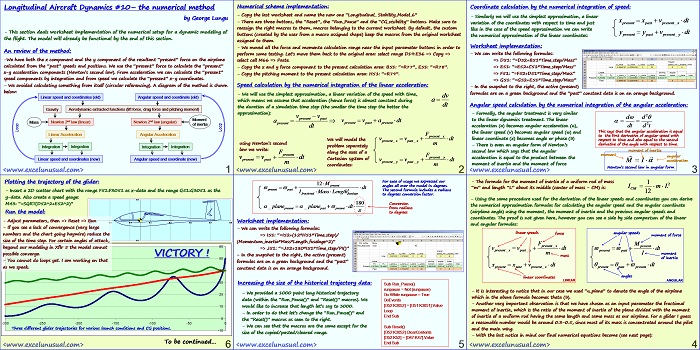
This section of the turorial finalizes the main dynamics calculations and implements the numerical method for approximating the glider trajectory. At this point, the model is already functional but with a crude interface. [sociallocker][/sociallocker] Longitudinal Aircraft Dynamics #10- the numerical method by George Lungu – This section deals worksheet implementation of the numerical setup for a dynamic modeling of the flight. The… Read More... "Longitudinal Aircraft Dynamics #10 – implementing the numerical method"
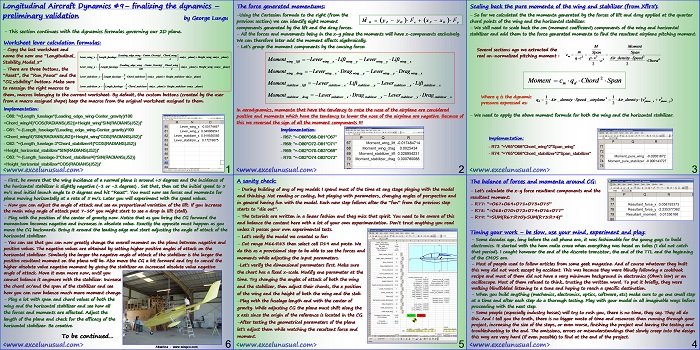
This tutorial finalizes the implementation of the forces and momenta acting on the plane. It also initiates some hand testing and validation of the overall dynamics of the plane. [sociallocker][/sociallocker] Longitudinal Aircraft Dynamics #9- finalizing the dynamics – preliminary validation by George Lungu – This section continues with the dynamics formulas governing our 2D plane. Worksheet lever calculation formulas: – Copy… Read More... "Longitudinal Aircraft Dynamics #9 – more about forces and momenta – preliminary validation and testing"
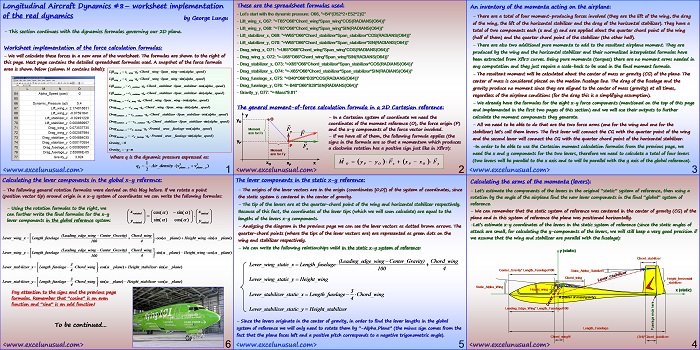
This section continues the worksheet implementation of the dynamics formulas for aerodynamic forces and momenta. [sociallocker][/sociallocker] Longitudinal Aircraft Dynamics #8- worksheet implementation of the real dynamics by George Lungu – This section continues with the dynamics formulas governing our 2D plane. Worksheet implementation of the force calculation formulas: – We will calculate these forces in a new area of the worksheet.… Read More... "Longitudinal Aircraft Dynamics #8 – worksheet implementation of the dynamics equations (c)"
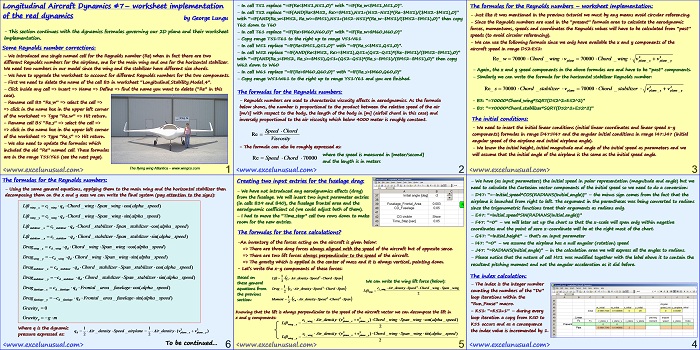
This section continues the worksheet implementation of the dynamics formulas. [sociallocker][/sociallocker] Longitudinal Aircraft Dynamics #7- worksheet implementation of the real dynamics by George Lungu – This section continues with the dynamics formulas governing our 2D plane and their worksheet implementation. Some Reynolds number corrections: – We introduced one single named cell for the Reynolds number (Re) when in fact there… Read More... "Longitudinal Aircraft Dynamics #7 – worksheet implementation of the dynamics equations (b)"
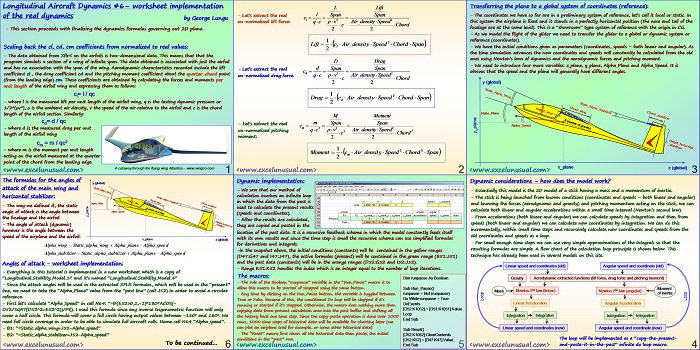
In this section, the parameters cl, cd and cm are scaled back to the force of lift, drag and the pitching moment of the aircraft. After that, the numerical modeling scheme is described together with the macros behind it. At the end, the formulas for the angles of attack of the wing and the horizontal stabilizer are introduced. [sociallocker][/sociallocker] Longitudinal Aircraft Dynamics #6- worksheet… Read More... "Longitudinal Aircraft Dynamics #6 – worksheet implementation of the dynamics equations (a)"